
This page documents how I tried to use TwinCAT3 to configure my ProNET servo drive, so that I could use it with linuxcnc-ethercat.
Disclaimer:
I’m not saying this is the right way to do it.
I’m not saying it works.
I’m saying this is how I did it.
Everything I know about TwinCAT3, I got from the tutorial on contactandcoil.com, plus the Beckhoff docs.
I went thru the first 5 or 6 chapters of the tutorial, and then skipped to chapter 11 on Motion Control.
After a few false starts, I wound up with a configuration that looked like this:
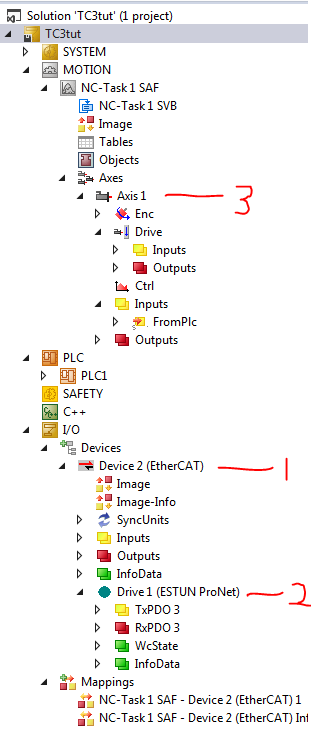
The configuration has:
1) an ethercat master
2) 1 ethercat slave (my ProNET servo) and
3) a corresponding axis within a motion task.
I modified the slave’s Process Data settings to use PDOs x1602 and x1A02 with 2 and 3 PDO entries, respectively:
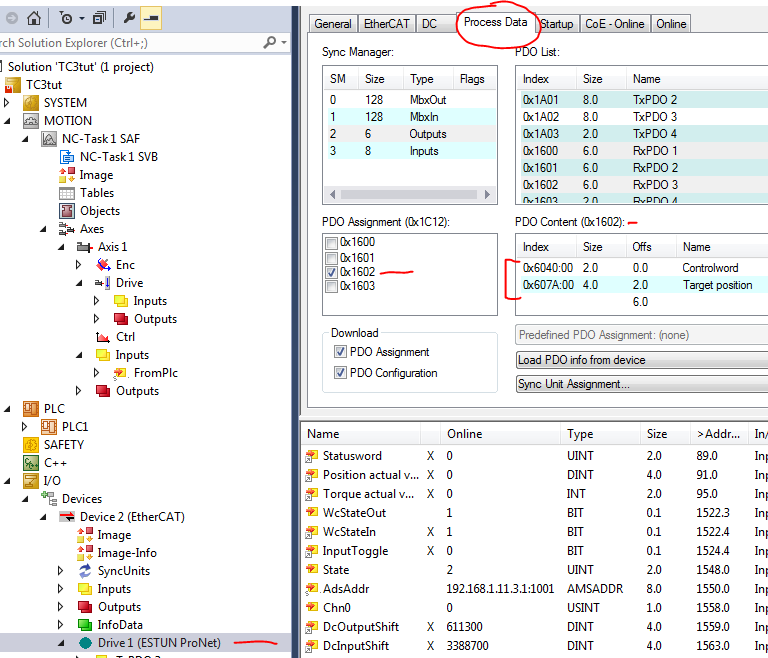
PDO details for RXPDO at x1602
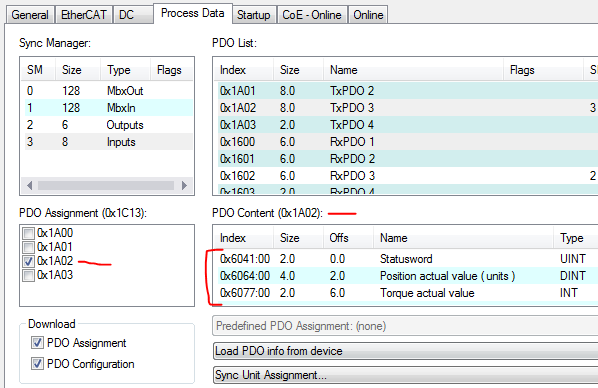
PDO details for TXPDO at x1A02
There does not seem to be an ‘Apply’ button ??
I do: ‘save all’ + ‘build solution’ + ‘Activate Configuration’ and then, to confirm that the drive is responsive, I pull up this jog dialog:
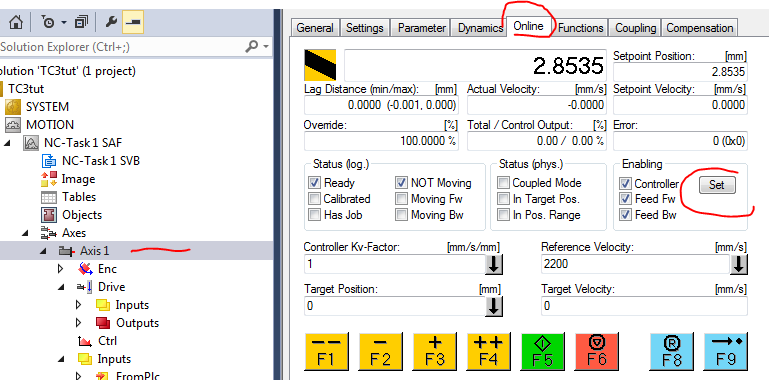
This dialog becomes enabled after I ‘Activate Configuration’.
The drive goes into RUN mode + OP state when I enable it with SET.
When I use the buttons to control the motor, I tend to get following- or encoder errors, but I think that’s a detail for another day. TwinCAT hangs up a lot, so I didn’t try very hard. At least this shows that the drive is functional – when it wants to be.
I return to config mode and, now that I know the motor seems to work, I want to write the settings to EEPROM. Or, as they say, “configure the drive.”
So I go to the drive, then: EtherCAT + advanced settings + Smart View.
I press ‘Write EEPROM’ and I pick the ProNET drive and click OK.
It takes about 5 minutes, but it eventually finishes without any apparent error or warning.
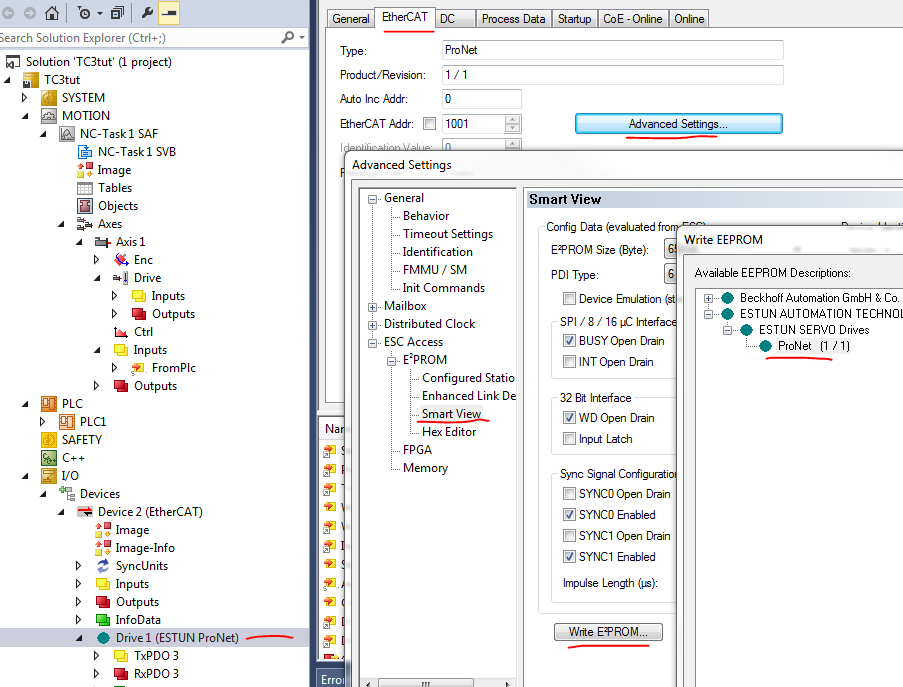
Writing the EEPROM
That’s how I do it, and I’m not at all sure it’s right.
How do You configure your drive with TwinCAT?